
Research and application of UAV in live working of transmission line
-
摘要:
将无人机应用于输电线路检修作业,创新电力线路带电作业方法,是一次传统技术和新兴科技的一次尝试。通过无人机搭载抛绳器,连接自动挂钩和高强度绝缘绳,自动挂钩利用无人机挂设于高压导线上,检修人员可利用电动升降装置沿着高强度绝缘绳进行升降,上升至作业位置进行检修作业,提高了作业效率,实践证明该方法值得推广应用。
Abstract:It is an attempt of traditional technology and new technology to apply UAV to transmission line maintenance and innovate live working method of power line. The UAV is equipped with a rope thrower to connect the automatic hook and high-strength insulating rope. The automatic hook is hung on the high-voltage wire by the UAV. The maintenance personnel can use the electric lifting device to lift along the high-strength insulating rope and rise to the working position for maintenance, which improves the operation efficiency. Practice has proved that this method is worthy of popularization and application.
-
Keywords:
- transmission line /
- UAV /
- line maintenance /
- live working
-
近年来, 随着生产生活用电量的需求逐步增大, 高压输电线路作为国家电网中的骨干网架结构, 其运行方式极为复杂, 平时很难进行停电检修工作, 因此对于高压输电线路必须采用带电检修方式消除缺陷。现有技术中, 对高压线路进行带电检修作业时, 作业人员穿着屏蔽服携带绳索登塔, 通过跨二短三法、吊篮法、软梯法等方法进出电场进行线路检修, 该方法对人员体力及安全措施要求较高, 安全风险较大。另外现有技术中的, 对高压线路进行带电检修作业时, 受作业地域地形影响较大, 不利于检修人员顺利开展工作, 且极大地增加了作业人员检修时的作业风险, 为解决这些难题, 我们已将无人机应用于输电线路带电作业[1], 并进行了一些研究和探索。
1. 作业方法及工器具的选择
考虑到我们主要须解决的问题是如何选择一种方法, 在带电的情况下使人员能快速准确的到达作业点, 并有一个稳定的操作平台进行作业, 因此我们经过实践应用, 最终选择了使用无人机携带研制的自动挂钩将传递绳挂在作业点, 使用传递绳完成电动检修平台的传递, 从而进入电场完成作业。
无人机: 操作稳定, 定位准确, 高荷载八旋翼无人机(如图 1所示)。
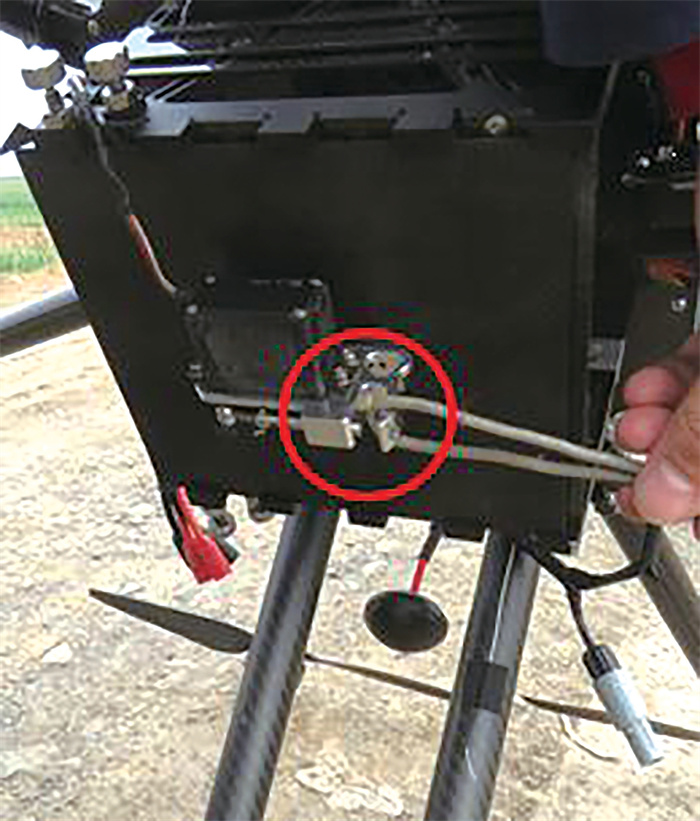
抛绳器: 用于挂载高强度绝缘绳, 到达作业位置, 通过遥控使高强度绝缘绳脱离(如图 2所示)。
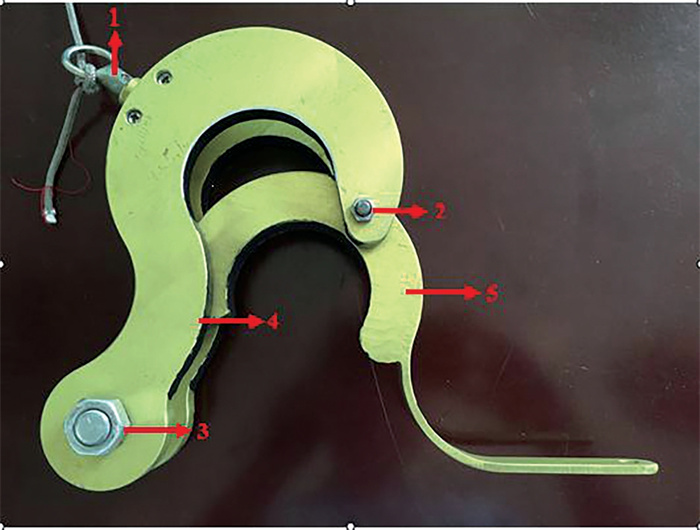
自动挂勾: 无人机提升高强度绝缘绳, 将活动挂钩闭锁装置勾住导线, 活动挂钩受力至沟槽位置, 挂钩挂牢导线, 自动挂钩闭锁装置自动锁止(如图 3所示)。
高强度绝缘绳: 设置2条绳子, 一粗一细, 细绳与抛绳器、挂钩连接, 粗绳分别与挂钩和电动升降装置相连;
电动升降装置: 与高强度绝缘绳相连, 并且可通过电力驱动升降, 承载检修人员沿连接于自动挂钩上的高强度绝缘绳上下移动(如图 4所示)。
后备保护绝缘绳: 作为高空作业人员的后备保护, 一端与自动挂钩相连, 另一端固定于地面。
2. 作业方法及工器具的选择
2.1 无人机精准定位抛绳
将无人机下端连接抛绳器, 抛绳器下端连接细高强度绝缘绳和自动挂钩, 自动挂钩分别将粗高强度绝缘绳和后备保护绝缘绳连接。通过遥控器操控无人机带动高强度绝缘绳和后备保护绝缘绳上升, 通过机载摄像头观察无人机和挂钩位置, 待挂钩到达高压导线上需要检修的位置, 进而确定自动挂钩位置; 控制无人机越过高压导线, 停稳后进行抛绳。
2.2 挂钩准确进入作业位置
无人机将自动挂钩提升至指定位置, 进行抛绳, 抛绳后自动挂钩的活动挂钩接触导线, 在重力的作用下, 自动挂钩缓慢下滑, 待导线进入自动挂钩至锁住, 即完成搭线作业, 自动挂钩挂设在高压导线上。
2.3 电动升降装置准备就绪
完成搭线后, 自动挂钩将粗高强度绝缘绳和后备保护绳上端固定在导线上, 地面配合人员将粗高强度绝缘绳和后备保护绳固定于地面上, 防止绳子摆动。将粗高强度绝缘绳连接到电动升降装置中的卡盘上, 并操控电动升降装置, 在地面进行试验, 电动升降装置提升稍高于地面时, 关闭升降机构。
2.4 乘坐电梯进行检修作业
检修人员乘坐电动升降装置(相当于电梯), 并且系好安全带, 操控电动升降装置上升至合适的检修位置, 进行检修作业; 检修完成后, 操控电动升降装置下降至地面。
2.5 无人机拆卸升降装置
首先将电动升降装置从粗高强度绝缘绳上拆下, 然后将固定于地面上的绝缘绳拆下; 将无人机下连接辅助挂钩, 并控制无人机飞至自动挂钩上方, 通过无线高清拍摄组件观察, 将辅助挂钩与自动挂钩上的锁止圆环相钩住; 控制无人机上升, 当自动挂钩脱离高压导线后, 控制无人机携带搭挂件飞至地面, 将粗高强度绝缘绳和后备保护绝缘绳从自动挂钩上取下。
3. 本方法的突出点
通过设置能够挂于高压导线的自动挂钩, 可有效降低作业人员劳动强度, 便于输电线路检修。自动挂钩连接有粗高强度绝缘绳, 能够方便检修人员乘坐升降组件上升至检修位置, 而且自动挂钩还连接有后备保护绝缘绳, 2根绝缘绳可固定于地面, 便于检修人员的检修工作, 同时也提高了检修人员的安全性。
设有无人机, 在检修作业时, 将高强度绝缘绳和后备保护绝缘绳通过自动挂钩挂设在导线上; 检修完成后, 也便于将自动挂钩在高压导线上取下。
本方法提供的高压线路检修组合装置, 其结构简单, 便于携带, 易于操作, 适用于不同环境的高压线路检修作业, 特别是山区、丘陵、河海湖泊等人员到达困难的线路检修, 选取人员、车辆能够到达或缺陷位置, 通过升降组件与高强度绝缘绳的配合, 直达作业位置, 极大减轻作业人员劳动强度, 提高了高压线路检修作业的提升效率, 也提高了高压线路检修作业的安全性。
4. 安全效益
4.1 提升作业安全性
解决了部分塔形组合间隙[2]不足的问题。将进出电场时铁塔与导线间的组合间隙转变成了地面与导线间的组合间隙, 避免了因部分塔形带电作业组合间隙较小、安全风险增大的情况出现。
全程提供可靠的后备保护。等电位人员升降全过程均处于双绳保护后备保护状态, 作业的安全性得到了充分保障。
4.2 提高作业效率
4.2.1 缩短进出电场所用时间
采用高压输电线路无人机结合电动升降装置进出等电位作业方法, 可以让等电位人员直接从地面到达导线作业点, 节省了传统方法中攀登铁塔、沿导线到达作业位置所用的时间, 在试验中总体节省了2~4 h, 有效提高了工作效率。
4.2.2 减少作业人员数量
以生产中实际应用最多的吊篮法进出电场为例, 传统方法需要配置至少1名工作负责人、1名专责监护人、3名地面配合人员、2名地电位配合人员、一名等电位人员, 共计8人; 新方法仅需1名工作负责人、1名地面配合人员、1名无人机驾驶员、1名等电位人员, 共计4人, 无人机驾驶员可以视情况兼任安全监护人, 效果显著。
待作业人员从电动升降装置上转移到地面, 使用无人机吊起自动挂钩, 将绳索吊运至地面, 作业全部完成。无需高空配合人员拆卸工具、传递工具, 有效降低作业人员劳动强度。
5. 结束语
高压输电线路是国家电网中的骨干网架结构, 其输电网络的运行方式极为复杂, 进行带电检修作业时对人员体力及安全措施要求较高。采用无人机自动挂拆装置, 便于检修人员的检修工作, 提高了检修人员的安全性, 提高了工作效率, 节约了经济成本。
-
[1] 刘志武. 轻型无人机在输电带电作业中的应用. 电力大数据[J], 2018, 21(11). [2] 刘林明. 输电线路带电检修作业的安全防护研究. 低碳世界[J], 2016(18). [3] 农海雄. 无人机在带电作业中的运用. 建材发展导向: 下[J], 2015, 000(011).
 下载:
下载:


计量
- 文章访问数: 0
- HTML全文浏览量: 0
- PDF下载量: 0

